Canbus là gì? Đây là câu hỏi mà bất kỳ kỹ thuật viên ô tô, kỹ sư điện tử hay người đam mê công nghệ đều cần hiểu rõ. CAN bus (Controller Area Network) là một giao thức truyền thông nối tiếp tốc độ cao, được thiết kế để cho phép các bộ vi điều khiển và thiết bị điện tử trong xe hơi hoặc máy móc công nghiệp giao tiếp với nhau mà không cần máy tính chủ. Ra đời từ những năm 1980 bởi Bosch, chuẩn CAN bus đã trở thành xương sống của mọi hệ thống điện tử hiện đại, từ hệ thống phanh ABS, túi khí, cho đến cửa sổ điện và hệ thống giải trí. Bài viết này sẽ phân tích chuyên sâu về bản chất kỹ thuật, nguyên lý hoạt động, các ứng dụng thực tế và những lưu ý quan trọng khi làm việc với mạng CAN bus.
CAN bus là viết tắt của Controller Area Network, một chuẩn giao tiếp nối tiếp được phát triển bởi Robert Bosch GmbH vào năm 1985. Mục tiêu ban đầu là thay thế hệ thống dây điện phức tạp và đắt tiền trên ô tô bằng một bus truyền thông hai dây duy nhất. Trước CAN, mỗi bộ điều khiển điện tử (ECU) phải có dây riêng kết nối trực tiếp với các cảm biến và cơ cấu chấp hành, tạo ra một mớ dây chằng chịt, tăng trọng lượng và khó bảo trì.
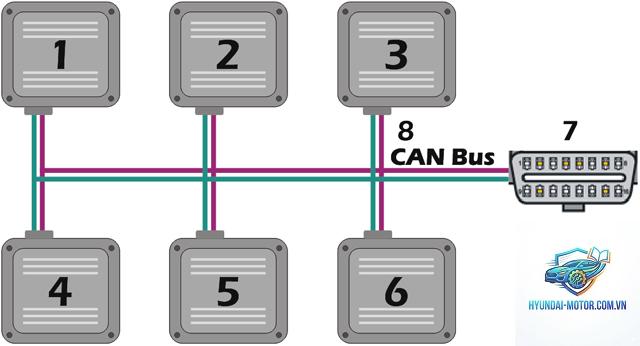
Với CAN bus, tất cả các ECU như động cơ, hộp số, ABS, điều hòa… được kết nối vào cùng một cặp dây xoắn đôi (CAN High và CAN Low). Dữ liệu truyền đi dưới dạng các frame được xác định bởi một mã định danh (identifier) duy nhất. Các ECU khác nhau sẽ lọc frame và chỉ nhận dữ liệu có liên quan đến chức năng của mình. Điều này giúp giảm 50-70% lượng dây điện trong xe, đồng thời tăng độ tin cậy và khả năng mở rộng.
Nguyên lý hoạt động của mạng CAN
CAN bus hoạt động dựa trên hai dây tín hiệu vi sai: CAN High (CANH) và CAN Low (CANL). Khi bus ở trạng thái idle (nghỉ), cả hai dây đều duy trì điện áp danh định khoảng 2.5V. Khi một ECU muốn truyền dữ liệu, nó tạo ra sự chênh lệch điện áp: CANH tăng lên 3.5V và CANL giảm xuống 1.5V, tạo ra mức logic dominant (trội) là ‘0’. Ở trạng thái recessive (lặn) tương ứng với mức logic ‘1’. Cơ chế chênh lệch điện áp này giúp chống nhiễu điện từ rất tốt, đặc biệt quan trọng trong môi trường ô tô có nhiều động cơ, thiết bị điện.
Một trong những điểm đặc biệt là giao thức CAN sử dụng cơ chế xác định quyền ưu tiên dựa trên mã định danh (arbitration). Nếu hai ECU cùng truyền dữ liệu cùng lúc, ECU có mã định danh nhỏ hơn (thường tương ứng với mức độ ưu tiên cao hơn) sẽ thắng thế và tiếp tục truyền, ECU kia tự động dừng và thử lại sau. Ví dụ, frame dữ liệu của hệ thống phanh (ID 0x200) sẽ luôn được ưu tiên truyền trước dữ liệu cửa sổ điện (ID 0x600).
Phân loại và các chuẩn CAN bus phổ biến
CAN 2.0A (Standard CAN) và CAN 2.0B (Extended CAN)
Có hai phiên bản chính của giao thức CAN. CAN 2.0A sử dụng mã định danh 11 bit, cho phép tối đa 211 = 2048 mã định danh khác nhau. Trong khi đó, CAN 2.0B mở rộng lên 29 bit, hỗ trợ hơn 536 triệu mã định danh. CAN 2.0B tương thích ngược, nghĩa là một thiết bị CAN 2.0B có thể nhận frame của CAN 2.0A, nhưng ngược lại thì không. Trong thực tế, hầu hết các xe sản xuất từ năm 2000 trở đi đều dùng CAN 2.0B do nhu cầu kết nối ngày càng nhiều ECU.
CAN FD (CAN Flexible Data-Rate)
CAN FD là bước phát triển tiếp theo, ra đời vào năm 2012 bởi Bosch. Điểm khác biệt chính là tốc độ truyền dữ liệu linh hoạt: phần tiêu đề và xác nhận vẫn ở tốc độ tiêu chuẩn (125 kbps đến 1 Mbps), nhưng phần dữ liệu có thể truyền ở tốc độ lên đến 8-10 Mbps. Ngoài ra, độ dài tối đa của trường dữ liệu được tăng từ 8 byte lên 64 byte. CAN FD tương thích một phần với CAN 2.0: thiết bị CAN FD có thể giao tiếp với thiết bị CAN 2.0 ở chế độ thường, nhưng nếu muốn tận dụng tốc độ cao, cả hai đầu phải hỗ trợ CAN FD.
Một frame CAN bus có nhiều trường, nhưng quan trọng nhất gồm: SOF (Start of Frame) luôn là bit dominant báo hiệu bắt đầu; trường arbitration chứa mã định danh 11 hoặc 29 bit; trường control chứa bit RTR (Remote Transmission Request) và DLC (Data Length Code) cho biết số byte dữ liệu; trường dữ liệu từ 0-8 byte (0-64 với CAN FD); trường CRC 15 bit để kiểm tra lỗi; và cuối cùng là trường ACK để xác nhận. Mỗi frame hoàn chỉnh có độ dài tối đa 108 bit (không tính bit stuffing) ở CAN 2.0A.
Ví dụ thực tế: Một frame từ cảm biến tốc độ bánh xe gửi lên ECU ABS có dạng: ID=0x320, DLC=2, dữ liệu = 0x00A3 (tương đương vận tốc 163 vòng/phút). ECU ABS nhận frame này và so sánh với các cảm biến khác để quyết định có kích hoạt hệ thống chống bó cứng hay không. Toàn bộ quá trình này diễn ra trong vài micro giây.
Thiết bị đầu cuối (Nodes) và cáp truyền
Một mạng CAN bus điển hình gồm nhiều node (ECU) kết nối với nhau bằng cáp xoắn đôi. Mỗi node có một bộ điều khiển CAN (CAN controller) và một bộ thu phát (CAN transceiver). Bộ điều khiển thường được tích hợp trong vi điều khiển hoặc là chip riêng như MCP2515. Bộ thu phát chuyển đổi tín hiệu số từ bộ điều khiển thành tín hiệu vi sai trên bus, ví dụ chip TJA1050 hoặc SN65HVD230. Hai đầu của bus phải có điện trở kết thúc 120 ohm để tránh phản xạ tín hiệu. Nếu mạng dài trên 1000 mét, có thể cần thêm các bộ lặp hoặc phương tiện Isolation để chống nhiễu.
Lợi ích và hạn chế của CAN bus
Ưu điểm nổi bật giúp CAN bus thống trị ngành ô tô
Giảm số lượng dây dẫn đáng kể: Thay vì hàng trăm dây riêng lẻ, CAN bus chỉ cần hai dây cho tất cả các thiết bị. Điều này giảm trọng lượng xe, chi phí lắp ráp và khả năng xảy ra lỗi kết nối.
Khả năng chống nhiễu vượt trội: Nhờ tín hiệu vi sai và cáp xoắn đôi, CAN bus vẫn hoạt động ổn định ngay cả khi gần dây cao áp, động cơ điện hoặc bộ sạc xe điện. Tỷ lệ lỗi bit rất thấp (BER < 10-12).
Cơ chế phát hiện và sửa lỗi tích cực: Mỗi node đều có khả năng phát hiện lỗi CRC, lỗi bit, lỗi trường, và lỗi ACK. Nếu một node phát hiện lỗi, nó sẽ gửi một frame lỗi đặc biệt để phá hỏng frame đang truyền, buộc node gửi phải truyền lại. Cơ chế này đảm bảo độ tin cậy cao cho các ứng dụng an toàn.
Tính thời gian thực: Nhờ cơ chế arbitration dựa trên độ ưu tiên, các thông điệp quan trọng như phanh, túi khí luôn được truyền trước. Thời gian truyền frame có thể được dự đoán trước, đáp ứng yêu cầu thời gian thực của hệ thống.
Những hạn chế cần cân nhắc khi ứng dụng
Tốc độ truyền bị giới hạn khi khoảng cách xa: CAN bus tốc độ cao (1 Mbps) chỉ hoạt động trong khoảng 40 mét. Để đạt khoảng cách 1000 mét, tốc độ phải giảm xuống dưới 125 kbps. Điều này hạn chế ứng dụng trong các hệ thống nhà máy lớn.
Băng thông tổng thể không cao: Tối đa chỉ 1 Mbps (8 Mbps với CAN FD), không phù hợp để truyền dữ liệu lớn như video hoặc hình ảnh camera. Hệ thống giải trí trên xe thường dùng giao thức riêng (MOST, Ethernet).
Chi phí phần cứng cao hơn so với một số giao thức đơn giản: Mỗi node cần có transceiver và controller CAN, trong khi các giao thức như LIN (Local Interconnect Network) chỉ cần một dây và chi phí thấp hơn. Do đó, CAN thường được dùng cho các hệ thống quan trọng, còn LIN dùng cho các thiết bị phụ trợ.
So sánh CAN bus với các giao thức truyền thông khác
CAN vs LIN (Local Interconnect Network)
LIN là giao thức một dây đơn giản, chi phí thấp, tốc độ tối đa 20 kbps. LIN thường được dùng cho các thiết bị không yêu cầu tốc độ cao như cửa sổ điện, gương chiếu hậu, đèn nội thất. CAN thì xử lý các hệ thống an toàn quan trọng. Một xe hơi hiện đại có thể có 1-2 bus CAN và 3-4 bus LIN, mỗi loại đảm nhận vai trò riêng.
CAN vs FlexRay
FlexRay là giao thức tốc độ cao hơn (lên đến 10 Mbps) với khả năng dự phòng và định thời chính xác, thường dùng trong hệ thống phanh by-wire, lái by-wire. Tuy nhiên, FlexRay đắt hơn và phức tạp hơn nhiều. CAN FD hiện đang dần thay thế FlexRay vì đáp ứng tốc độ tương đương nhưng dễ triển khai hơn.
CAN vs Ethernet
Ethernet cho tốc độ rất cao (100 Mbps, 1 Gbps) nhưng tiêu thụ nhiều năng lượng, chi phí cao và không có cơ chế thời gian thực chặt chẽ như CAN. Trong ô tô, Ethernet thường được dùng cho kết nối cổng chẩn đoán (OBD) và hệ thống ADAS cao cấp, còn CAN vẫn là xương sống cho các mạng điều khiển thời gian thực.
Ứng dụng thực tế của CAN bus trong đời sống
Ngành công nghiệp ô tô – động lực phát triển chính
Hầu hết mọi xe du lịch, xe tải, xe buýt sản xuất từ năm 1995 đều có ít nhất một mạng CAN bus. Các chức năng điển hình: động cơ (ECU động cơ trao đổi dữ liệu với bộ điều khiển hộp số); hệ thống an toàn (ABS, ESC, túi khí); hệ thống thân xe (cửa sổ, khóa cửa, đèn); và hệ thống tiện nghi (điều hòa, ghế điện). Cổng OBD-II (On-Board Diagnostics) trên xe cho phép kỹ thuật viên đọc mã lỗi và dữ liệu cảm biến qua CAN bus bằng thiết bị chẩn đoán.
Ví dụ điển hình: Khi tài xế đạp phanh gấp, cảm biến chân phanh gửi tín hiệu qua CAN đến ECU ABS. ECU ABS ngay lập tức gửi lệnh đến bơm thủy lực và giảm áp suất phanh từng bánh. Đồng thời, một frame dữ liệu được gửi đến ECU động cơ để giảm moment xoắn, và đến ECU hộp số để nhả ly hợp. Tất cả diễn ra trong 20-40 mili giây.
Ứng dụng trong tự động hóa công nghiệp và nông nghiệp
CAN bus cũng được dùng rộng rãi trong các máy CNC, robot, thiết bị nhà máy (CANopen là tầng ứng dụng phổ biến). Máy kéo, máy gặt đập, máy xúc thủy lực sử dụng CAN bus để điều khiển động cơ, thủy lực và các cảm biến. Chuẩn J1939 của SAE được phát triển dựa trên CAN cho các ứng dụng xe hạng nặng và máy móc di động.
Hệ thống năng lượng và tòa nhà thông minh
Trong các trạm năng lượng mặt trời, CAN bus được dùng để kết nối các inverter, pin lưu trữ và bộ điều khiển. Ở tòa nhà, một số hệ thống HVAC, chiếu sáng và an ninh sử dụng CAN bus để đơn giản hóa đi dây và tăng độ tin cậy.
Sai lầm thường gặp khi làm việc với CAN bus và cách tránh
Sai lầm 1: Đấu nối sai điện trở kết thúc
Nhiều người mới bắt đầu không lắp hoặc lắp sai giá trị điện trở 120 ohm ở hai đầu bus. Hậu quả là tín hiệu bị phản xạ, gây méo frame và tăng tỷ lệ lỗi. Dấu hiệu nhận biết là thiết bị hoạt động không ổn định, thường xuyên mất kết nối. Cách khắc phục: luôn đo điện trở giữa CAN High và CAN Low khi mạng không hoạt động; kết quả phải khoảng 60 ohm (do hai điện trở 120 ohm mắc song song). Nếu thấy 120 ohm thì thiếu một điện trở, nếu 0 ohm thì có chập mạch.
Sai lầm 2: Nhồi nhét quá nhiều dữ liệu vào một frame
Mỗi frame CAN 2.0 chỉ chứa tối đa 8 byte dữ liệu. Nếu cần truyền một mảng 10 byte, phải chia làm hai frame. Một số lập trình viên cố gắng vượt quá giới hạn này bằng cách dùng hàm ghi vượt mức, gây lỗi overflow. Giải pháp: xem xét cấu trúc dữ liệu, tối ưu hóa bằng cách chỉ gửi giá trị delta (thay đổi) thay vì giá trị tuyệt đối. Với CAN FD, có thể dùng 64 byte cho khối dữ liệu lớn hơn.
Sai lầm 3: Không quan tâm đến định tuyến ID
Việc lựa chọn mã định danh không đúng có thể dẫn đến xung đột hoặc mất ưu tiên. Ví dụ, gán ID 0x100 cho hệ thống đèn nội thất trong khi hệ thống phanh cần ID 0x200 (số nhỏ hơn có độ ưu tiên cao hơn), sẽ khiến phanh không được ưu tiên. Cần lập kế hoạch dải ID sao cho các thông điệp an toàn có ID thấp nhất (ưu tiên cao) và các thông tin giải trí có ID cao nhất. Một số chuẩn như CANopen quy định rõ ràng cách phân bổ ID.
Lưu ý quan trọng khi thiết kế và bảo trì hệ thống CAN bus
Kiểm tra chất lượng cáp và đầu nối: Cáp xoắn đôi phải đúng tiêu chuẩn 120 ohm, mối hàn hoặc giắc cắm phải chắc chắn. Nhiễu thường đến từ các đầu nối lỏng lẻo hoặc cáp không đảo chiều xoắn.
Cân nhắc sử dụng bộ cách ly (galvanic isolation): Khi CAN bus kết nối giữa các thiết bị có nguồn điện khác nhau (ví dụ giữa xe và thiết bị chẩn đoán), bộ cách ly giúp chống dòng điện rò và bảo vệ cả hai hệ thống. Chip ISO1042 hoặc ADM3053 thường được dùng.
Tối ưu hóa tốc độ truyền theo chiều dài cáp: Không nên đặt tốc độ quá cao cho khoảng cách lớn. Bảng tham khảo: 1 Mbps phù hợp dưới 40m, 500 kbps dưới 100m, 250 kbps dưới 250m, 125 kbps dưới 500m, 50 kbps dưới 1000m.
Cập nhật firmware thường xuyên: Các node CAN có thể được cập nhật qua mạng (đặc biệt là CAN FD với kích thước dữ liệu lớn). Tuy nhiên, cần cơ chế bảo vệ để tránh ghi đè firmware sai dẫn đến node không hoạt động.
Câu hỏi thường gặp (FAQ) về CAN bus
CAN bus có thể có bao nhiêu node tối đa?
Về mặt lý thuyết, giới hạn chính là điện dung của bus. Một bus CAN tiêu chuẩn có thể hỗ trợ tối đa khoảng 30-40 node mà không cần bộ lặp. Nếu vượt quá, cần dùng các bộ lặp hoặc bridge để mở rộng mạng. Một số chuẩn công nghiệp như CANopen có thể hỗ trợ đến 127 node nhờ phân đoạn.
Làm sao để đọc dữ liệu từ CAN bus ô tô?
Để đọc dữ liệu CAN bus, cần một thiết bị giao diện như USB-CAN adapter (ví dụ: PCAN-USB, Kvaser, Arduino MCP2515). Kết nối thiết bị với cổng OBD-II của xe, sau đó dùng phần mềm như CANalyzer, PCAN-View hoặc các ứng dụng chuyên dụng (Torque Pro, OBD Fusion) để giải mã dữ liệu. Lưu ý rằng mỗi hãng xe có giải thích ID và công thức tính giá trị riêng, thường không công khai, cần tra cứu database.
Sự khác biệt giữa CAN bus tốc độ cao và tốc độ thấp?
CAN bus tốc độ cao (High-speed CAN, tiêu chuẩn ISO 11898-2) hoạt động ở tốc độ từ 125 kbps đến 1 Mbps, dùng cho hệ thống truyền động và an toàn. CAN bus tốc độ thấp (Low-speed CAN, tiêu chuẩn ISO 11898-3) tốc độ dưới 125 kbps, thường dùng cho các hệ thống thân xe và tiện nghi, với ưu điểm chịu lỗi cao hơn (có thể hoạt động ngay cả khi một dây bị đứt). Vật lý khác nhau: High-speed CAN dùng mức điện áp vi sai, Low-speed CAN dùng mức điện áp đơn.
Có thể tự chế tạo thiết bị giao tiếp CAN bus không?
Hoàn toàn có thể. Một mạch đơn giản gồm vi điều khiển (như ESP32, STM32) tích hợp sẵn CAN controller hoặc kết hợp chip MCP2515 SPI, và một transceiver như TJA1050. Lập trình bằng thư viện CAN (ví dụ CAN.h trên Arduino) cho phép gửi và nhận frame. Tuy nhiên, cần chú ý đến cấu hình tốc độ bit, điện trở kết thúc và nguồn cấp ổn định 5V hoặc 3.3V.
Tại sao đèn báo lỗi động cơ sáng liên quan đến CAN bus?
Đèn Check Engine sáng thường do mất kết nối giữa các ECU qua CAN bus. Nguyên nhân phổ biến: đứt dây CANH hoặc CANL, chập mát, hỏng transceiver ở một ECU, hoặc lỗi phần mềm khiến mạng quá tải. Kỹ thuật viên dùng máy chẩn đoán đọc mã lỗi U-code (U0100, U0140…) để định vị ECU mất liên lạc. Khắc phục bằng cách kiểm tra dây và đầu nối, thay thế ECU lỗi nếu cần.
Kết luận
Hiểu rõ canbus là gì không chỉ dừng lại ở việc biết đó là một giao thức truyền thông. Để thực sự làm chủ công nghệ này, bạn cần nắm vững nguyên lý điện áp vi sai, cấu trúc frame, cơ chế arbitration, cũng như cách chọn tốc độ và triển khai phần cứng. Từ một ý tưởng đơn giản giúp giảm dây điện trên ô tô, CAN bus đã phát triển thành nền tảng không thể thiếu cho ngành ô tô hiện đại, tự động hóa và năng lượng. Trong tương lai, CAN FD và CAN XL đang mở ra hướng đi mới với tốc độ cao hơn, tích hợp dễ dàng hơn với các hệ thống Ethernet và không dây. Dù bạn là kỹ sư, sinh viên hay người đam mê công nghệ, kiến thức về CAN bus sẽ luôn là lợi thế cạnh tranh quan trọng khi tiếp cận các hệ thống điều khiển tiên tiến. Việc nắm bắt chi tiết về các chuẩn, sai lầm thường gặp và cách khắc phục giúp bạn vận hành hệ thống hiệu quả, an toàn và đáng tin cậy hơn.