Trong lĩnh vực ô tô hiện đại và hệ thống nhúng, CAN bus là gì luôn là câu hỏi đầu tiên khi nhắc đến giao thức truyền thông nội bộ. CAN (Controller Area Network) là một chuẩn truyền thông nối tiếp được phát triển bởi Bosch vào những năm 1980, cho phép các bộ điều khiển điện tử (ECU) trong xe trao đổi dữ liệu với nhau qua một cặp dây xoắn đơn giản. Thay vì phải nối dây riêng cho mỗi tín hiệu, CAN bus kết nối tất cả các thiết bị như động cơ, hộp số, túi khí, hệ thống phanh ABS trên cùng một đường truyền, giảm khối lượng dây dẫn và tăng độ tin cậy. Hệ thống này hiện được ứng dụng rộng rãi trong ngành ô tô, máy nông nghiệp, thiết bị y tế và tự động hóa nhà máy.
CAN bus là một giao thức truyền thông dạng message-oriented, nghĩa là các thông điệp được gắn định danh (ID) thay vì gửi đến một địa chỉ cụ thể. Mọi ECU trên bus đều nhận được toàn bộ dữ liệu, nhưng chỉ ECU nào cần thông tin đó mới xử lý tiếp. Điều này giúp tiết kiệm băng thông và cho phép dễ dàng thêm bớt thiết bị mà không cần thay đổi phần cứng toàn hệ thống.
Lịch sử ra đời của CAN Bus
Giao thức CAN được Robert Bosch GmbH phát minh vào năm 1983 và chính thức công bố năm 1986 tại hội nghị SAE. Mẫu xe đầu tiên áp dụng CAN bus là Mercedes-Benz W140 (đời 1991). Từ đó, CAN nhanh chóng trở thành tiêu chuẩn thực tế trong công nghiệp ô tô, đặc biệt sau khi được chuẩn hóa thành ISO 11898 vào năm 1993. Sự ra đời của CAN FD (Flexible Data-Rate) năm 2012 đánh dấu bước phát triển lớn khi cho phép tốc độ truyền cao hơn và độ dài dữ liệu linh hoạt, đáp ứng nhu cầu ngày càng lớn về băng thông của các tính năng an toàn và hỗ trợ lái.
Cấu trúc và thành phần của hệ thống CAN Bus
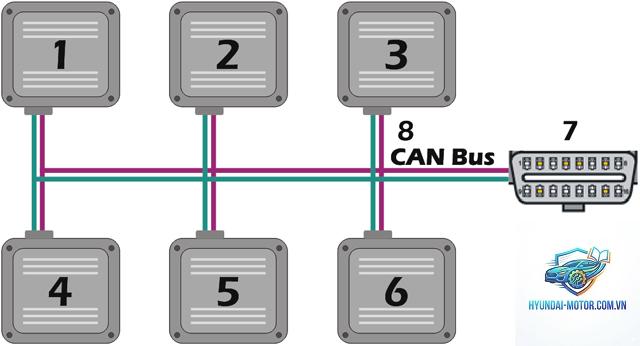
Một hệ thống CAN bus cơ bản gồm các thành phần: bộ điều khiển CAN tích hợp trong vi điều khiển, bộ thu phát CAN (transceiver), cáp xoắn đôi và các điện trở kết cuối. Các thành phần này phối hợp để đảm bảo truyền thông ổn định ở tốc độ lên đến 1 Mbit/s trong mạng CAN 2.0 tốc độ cao, hoặc 125 kbit/s cho CAN tốc độ thấp chịu lỗi.
Các thành phần chính
CAN Controller: thường tích hợp trong vi điều khiển, quản lý logic truyền thông, kiểm tra lỗi và đồng bộ hóa.
CAN Transceiver: chuyển đổi tín hiệu số từ controller thành tín hiệu vi sai trên dây bus và ngược lại.
Dây xoắn đôi (Twisted Pair): dùng hai dây CANHigh và CANLow, đảo chiều xoắn để chống nhiễu điện từ.
Điện trở kết cuối (Termination Resistor): thường 120 ohm ở hai đầu bus, phản xạ tín hiệu và giảm sóng dừng.
Khung dữ liệu CAN (CAN Frame)
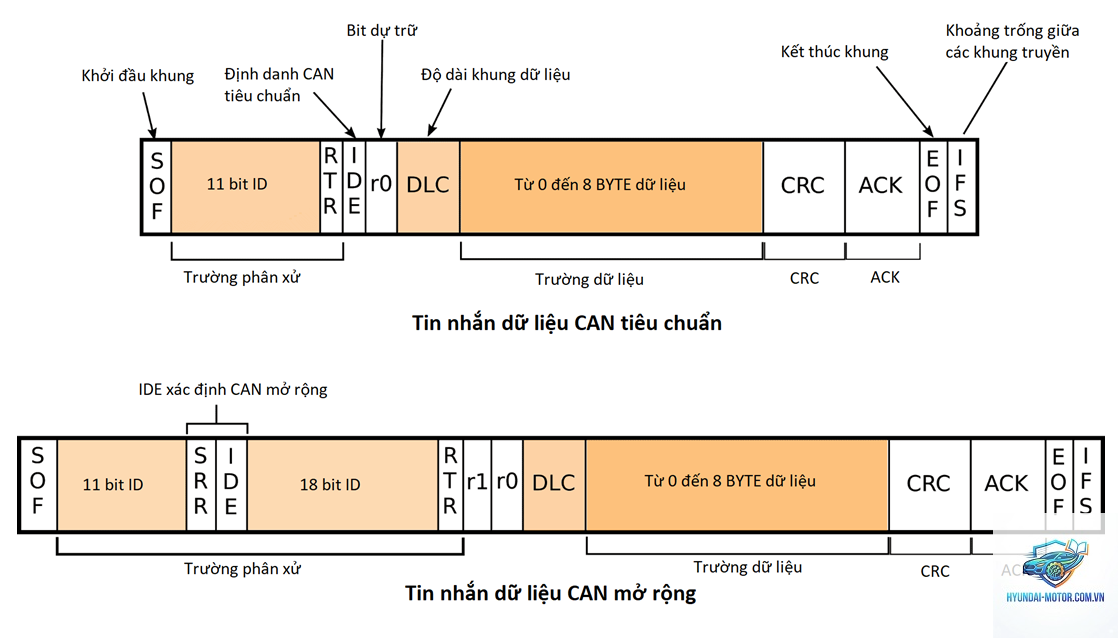
Mỗi thông điệp CAN được đóng gói trong một khung dữ liệu với cấu trúc: Start of Frame (1 bit chiếm bus), Arbtration Field (11 hoặc 29 bit ID và RTR), Control Field (6 bit chứa DLC – độ dài dữ liệu), Data Field (0-8 byte), CRC Field (15 bit checksum), ACK Field (2 bit xác nhận) và End of Frame (7 bit). Trong CAN FD, Data Field có thể mở rộng đến 64 byte và tốc độ truyền tăng gấp đôi ở phần dữ liệu.
Phân loại CAN Bus
Hiện có ba chuẩn chính: CAN 2.0A, CAN 2.0B và CAN FD. Mỗi chuẩn phù hợp với ứng dụng và yêu cầu băng thông khác nhau:
Tiêu chí
CAN 2.0A
CAN 2.0B
CAN FD
Định danh (ID)
11 bit (2.0 base)
11 bit hoặc 29 bit
11 bit hoặc 29 bit
Độ dài dữ liệu tối đa
8 byte
8 byte
64 byte
Tốc độ tối đa
1 Mbit/s
1 Mbit/s
8 Mbit/s (phase data)
Tốc độ truyền thông tin
Theo bit rate
Theo bit rate
Bật / tắt tốc độ cao (bit rate switch)
Khả năng tương thích
Không tương thích ngược
Hỗ trợ 2.0A
Tương thích với 2.0B
Ứng dụng chính
Hệ thống cơ bản, truyền động
Xe sang, mạng phức tạp
Hỗ trợ lái, OTA, ADAS
Việc lựa chọn chuẩn CAN bus phụ thuộc vào yêu cầu về số lượng tín hiệu, tần suất cập nhật và độ an toàn. CAN FD đang dần thay thế CAN 2.0 trong các thiết kế mới do lợi thế về tốc độ và độ dài dữ liệu.
Lợi ích và hạn chế của CAN Bus
CAN bus mang lại nhiều ưu điểm nổi bật nhưng cũng tồn tại một số nhược điểm cần cân nhắc:
Lợi ích
Tiết kiệm dây dẫn: So với hệ thống điểm-điểm, CAN bus giảm tới 80% khối lượng dây, hạ chi phí và trọng lượng xe.
Độ tin cậy cao: Cơ chế kiểm tra lỗi (CRC, ACK, Frame Check) và ưu tiên thông điệp (arbitration) đảm bảo dữ liệu luôn được truyền đúng thứ tự ưu tiên.
Khả năng mở rộng: Thêm ECU mới chỉ cần kết nối vào bus, không cần thay đổi kiến trúc tổng thể.
Giảm chi phí bảo trì: Chuẩn chung trên toàn ngành giúp dễ dàng chẩn đoán lỗi qua cổng OBD-II.
Tiết kiệm năng lượng: Các nút có thể chuyển sang chế độ ngủ khi không hoạt động, giảm tiêu thụ pin.
Hạn chế
Băng thông hạn chế: Tối đa 1 Mbit/s trên bus, không đủ cho ứng dụng multimedia hoặc dữ liệu lớn.
Độ dài bus giới hạn: Ở tốc độ cao, chiều dài bus tối đa chỉ khoảng 40m. Với tốc độ thấp (125 kbit/s) có thể lên vài trăm mét.
Không hỗ trợ truyền thông điểm-điểm: Mọi nút nhận cùng một lúc, gây khó khăn trong bảo mật nếu không có tầng mã hóa riêng.
Độ trễ không quyết định: Với lưu lượng cao, thời gian chờ arbitration có thể thay đổi, không phù hợp cho ứng dụng real-time cứng.
So sánh CAN Bus với các giao thức khác
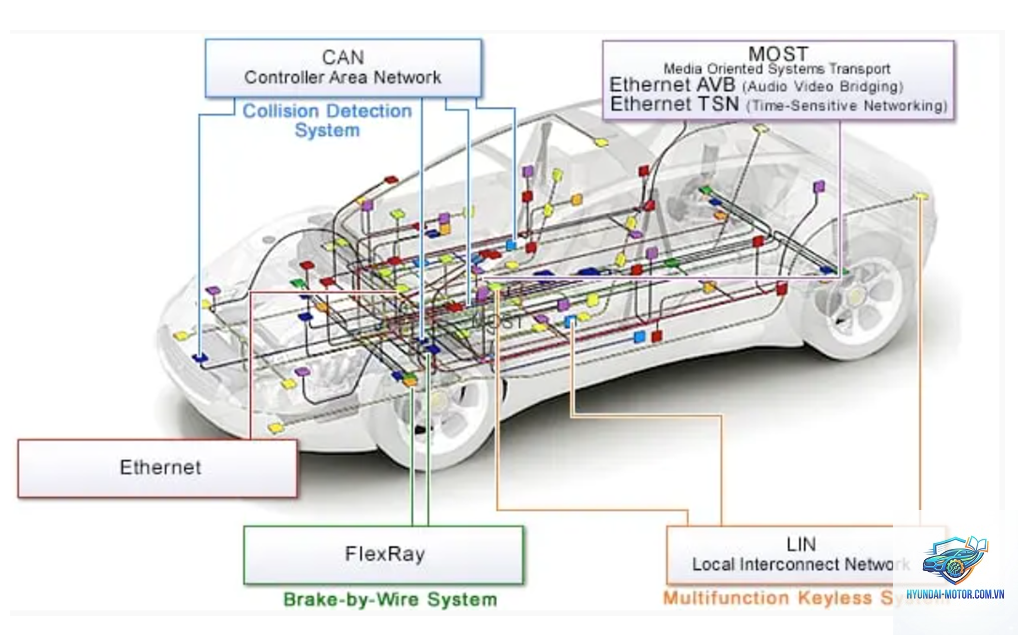
Trong cùng phân khúc mạng điều khiển, CAN bus thường được so sánh với LIN, FlexRay và Ethernet dùng trong ô tô:
Giao thức
Tốc độ
Topology
Ứng dụng
Chi phí
CAN
125 kbit/s – 1 Mbit/s
Bus đa trạm
Động cơ, truyền động, thân xe
Trung bình
LIN
20 kbit/s
Master-Slave
Cửa sổ, gương, ghế
Thấp
FlexRay
10 Mbit/s
Star / Bus kết hợp
Hệ thống lái, phanh by-wire
Cao
Automotive Ethernet (100BASE-T1)
100 Mbit/s
Switched star
ADAS, cảm biến, OTA, multimedia
Cao
LIN thường dùng cho các thiết bị đơn giản, tốc độ thấp. FlexRay dùng trong real-time an toàn nhưng chi phí cao và khó triển khai. Automotive Ethernet đang dần mở rộng nhờ tốc độ cao, nhưng vẫn còn đắt và đòi hỏi phần cứng phức tạp hơn. CAN bus vẫn là lựa chọn tối ưu về chi phí-hiệu quả cho hầu hết hệ thống điều khiển thân xe và truyền động.
Ứng dụng thực tế của CAN Bus
Ngoài ô tô, CAN bus còn được ứng dụng rộng rãi trong nhiều lĩnh vực khác nhau:
Trong ô tô hiện đại
Một chiếc xe có thể có tới 70 ECU kết nối qua hai đến ba bus CAN riêng (CAN tốc độ cao cho động cơ/hộp số, CAN tốc độ thấp cho thân xe, CAN chẩn đoán). Dữ liệu như vòng tua máy, tốc độ xe, trạng thái túi khí, áp suất lốp được truyền qua các bus này. Hệ thống OBD-II cho phép kỹ thuật viên đọc mã lỗi và dữ liệu động từ xa.
Trong công nghiệp (Industrial Automation)
CANopen, dựa trên giao thức CAN, là một trong những chuẩn truyền thông phổ biến trong máy CNC, robot, băng tải và hệ thống I/O từ xa. Ưu điểm chính là chi phí thấp và khả năng chống nhiễu tốt trong môi trường nhà máy.
Trong thiết bị y tế
Các máy chụp cộng hưởng từ (MRI), máy thở và máy theo dõi bệnh nhân thường dùng CAN bus để kết nối các cảm biến và bộ điều khiển nhờ đặc tính ổn định và an toàn.
Trong nông nghiệp và máy xây dựng
ISOBUS (ISO 11783) là chuẩn CAN dùng cho máy kéo, xe ủi, máy gặt đập, cho phép các thiết bị cầm tay (cảm biến GPS, bộ phận gắn sau) hoạt động kết nối với máy chính.
Hướng dẫn cơ bản về chẩn đoán và bảo trì CAN Bus
Khi gặp sự cố trên hệ thống CAN bus, việc chẩn đoán cần tuân theo quy trình có hệ thống. Giá trị đúng khoảng 60 ohm (hai điện trở 120 ohm song song).
Đo điện áp: Bật nguồn, đo CANH với GND (~2.5V đến 3.5V) và CANL với GND (~1.5V đến 2.5V). Chênh lệch giữa hai dây khi có truyền thông khoảng 2V.
Kiểm tra sóng bằng oscilloscope: Quan sát dạng tín hiệu vi sai, kiểm tra các đỉnh và độ dốc.
Đọc mã lỗi bằng máy chẩn đoán: Kết nối cổng OBD-II, đọc các mã U (Uxxxx) liên quan đến mạng CAN.
Kiểm tra lỗi vật lý: Dây đứt, chập mass, chập nguồn, transceiver hỏng là những nguyên nhân phổ biến.
Một số thiết bị hỗ trợ chẩn đoán chuyên dụng như CANtact, PCAN-USB hoặc Busmaster (phần mềm miễn phí) cho phép phân tích sâu lưu lượng CAN bus, giải mã ID và xem tần số tin nhắn.
Sai lầm thường gặp khi làm việc với CAN Bus
Dù CAN bus được thiết kế ổn định, người mới tiếp cận thường mắc một số sai lầm:
Không lắp điện trở kết cuối: Thiếu điện trở làm tín hiệu phản xạ gây lỗi bit. Ngược lại, lắp quá 2 đầu dẫn đến giảm biên độ tín hiệu.
Dùng cáp không đúng chuẩn: Cáp UTP thường (Cat5e) có trở kháng 100 ohm, không khớp với 120 ohm của CAN, gây suy hao và lỗi timing.
Nối thêm thiết bị không có khả năng chịu lỗi: Một số thiết bị giá rẻ có transceiver kém chất lượng, làm méo tín hiệu trên bus.
Chọn sai baudrate: Tất cả ECU phải cùng tốc độ bit. Nếu một ECU khác tốc độ, hệ thống sẽ không giao tiếp.
Không chú ý đến số lượng nút tối đa: Khoảng 32 nút đối với CAN 2.0 tốc độ cao; nếu quá nhiều cần dùng CAN FD hoặc thêm gateway.
Lưu ý quan trọng khi triển khai hệ thống CAN Bus
Để thiết kế mạng CAN bus thành công, cần lưu ý các nguyên tắc sau:
Tính toán tải bus: Không để tổng thời gian sử dụng bus (bus load) vượt quá 80% trong trường hợp xấu nhất, nếu không sẽ xảy ra trễ và mất thông điệp ưu tiên thấp.
Phân chia ID và ưu tiên hợp lý: ID càng thấp (giá trị số càng nhỏ) thì ưu tiên càng cao. Các tín hiệu an toàn như phanh, túi khí nên có ID thấp nhất, tín hiệu thông tin giải trí nên ở ID cao.
Kiểm tra tính tương thích điện từ (EMC): Dây xoắn đúng bước, vỏ bọc chống nhiễu và khoảng cách ly phù hợp giúp hệ thống vượt qua kiểm tra EMC.
Bảo vệ cổng CAN khỏi quá áp: Dùng diode TVS hoặc bộ cách ly (galvanic isolation) cho các bus đi ra ngoài vỏ máy.
Chọn chuẩn CAN phù hợp với tương lai: Nếu có kế hoạch nâng cấp thêm tính năng (OTA, ADAS), nên chọn CAN FD để có dư địa băng thông.
Câu hỏi thường gặp (FAQ)
CAN bus là gì và tại sao nó quan trọng?
CAN bus là hệ thống kết nối các bộ điều khiển trong xe với nhau qua cặp dây xoắn, giúp giảm dây dẫn và tăng độ tin cậy. Nó quan trọng vì là nền tảng cho hầu hết các hệ thống điện tử trên xe hiện đại.
Tốc độ của CAN bus là bao nhiêu?
Tốc độ tối đa của CAN 2.0 là 1 Mbit/s (với chiều dài bus dưới 40 m). CAN FD có thể đạt tới 8 Mbit/s trong phần truyền dữ liệu.
Cách kiểm tra điện trở kết cuối CAN bus?
Dùng đồng hồ vạn năng ở thang đo ohm, tắt nguồn, đo giữa chân CANH và CANL. Giá trị đúng là 60 ohm (khi bus có hai đầu).
CAN bus có thể kết nối được bao nhiêu thiết bị?
Về mặt lý thuyết có thể lên đến 112 nút, nhưng thực tế giới hạn ở 32 nút để đảm bảo chất lượng tín hiệu và độ trễ.
Sự khác biệt giữa CAN 2.0B và CAN FD là gì?
CAN FD cho phép độ dài dữ liệu lên đến 64 byte và có thể chuyển đổi tốc độ cao trong quá trình gửi dữ liệu, trong khi CAN 2.0B chỉ gửi tối đa 8 byte với tốc độ cố định.
Làm thế nào để đọc mã lỗi CAN bus?
Dùng máy chẩn đoán OBD-II hoặc thiết bị chuyên dụng (ví dụ Peak PCAN-USB). Các mã lỗi Uxxxx liên quan đến mạng giao tiếp (ví dụ U0100 mất liên lạc với ECU động cơ).
Kết luận
Hiểu rõ CAN bus là gì là bước cơ bản nhưng không thể thiếu đối với bất kỳ ai làm việc trong lĩnh vực kỹ thuật ô tô, điện tử nhúng hoặc tự động hóa. Giao thức này đã chứng minh tính ổn định qua hơn ba thập kỷ và tiếp tục phát triển với CAN FD để đáp ứng yêu cầu của xe kết nối và tự lái. Với chi phí thấp, khả năng chống nhiễu tốt và dễ dàng mở rộng, CAN bus vẫn là lựa chọn hàng đầu cho các hệ thống điều khiển thời gian thực có độ tin cậy cao. Khi thiết kế hay bảo trì hệ thống CAN bus, cần tuân thủ các nguyên tắc về điện trở kết cuối, chọn cáp, tính tải bus và phân quyền ưu tiên ID để đảm bảo hệ thống hoạt động trơn tru. Đây là công nghệ nền tảng mà mọi kỹ sư điện tử ô tô cần nắm vững nếu muốn làm chủ các hệ thống hiện đại trong xe và máy móc công nghiệp.